想起很久以前玩過一種上鏈的玩具車,它神奇地走到檯邊時不會掉下,馬上自動轉彎,經過一番研究後組裝了以下的Never Fall Bumper Car (以下簡稱Bumper car):
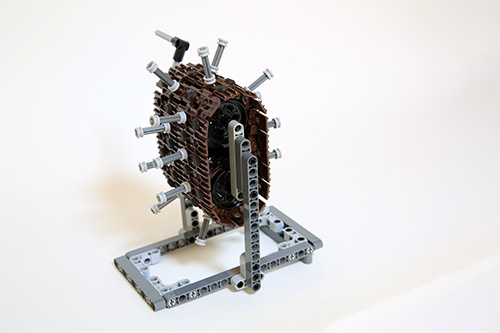
Bump Car 外觀:
原理是這樣的:
組裝一部用馬達驅動的車,其中一個車輪由馬達經齒輪驅動,車能向前行就靠這輪的動力
另一個輪接到差速器,直向前行的時候整個差速器旋轉,右輪帶動左輪一起轉,轉彎時左右輪的速度不一樣,用差速器就可使左輪慢些,停止,甚至反方向轉。
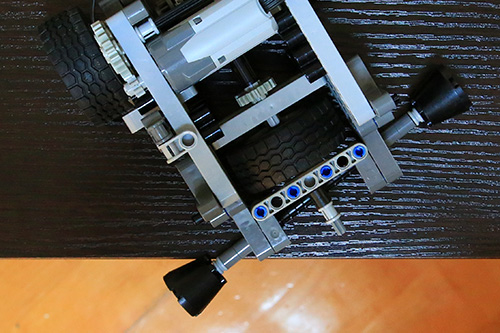
由車底看
第三個輪就跟之前兩個成90度(以下稱「90度輪」),當前輪越過檯邊時就靠它起轉彎作用。這車輪是由同一馬達經錐齒輪推動,轉速跟上述的後右輪一樣。下圖由車底方向看:
注意這個90度輪要比後輪高一點,即在桌面上行走時它應離開桌面一點。當車行走時它一直離地空轉。
前輪其實是一對Lego Cone 4x4x2,當前輪越過檯邊時需要那斜面使它容易返回檯上。還有那穿著的Axle是可以有點擺動的。
車越過檯邊時能自動轉彎是全憑前輪跟90度輪的配合,當車未過檯邊時,前輪和後輪跟檯面接觸,90度輪跟檯面離開一點,車就一直向前行。
當車越過檯邊時,前輸向下跌,90度輪跟檯面接觸,使車馬上向左轉。
當前輪因車轉彎開始返回檯面時,左前輪先上檯面,使整組前輪的懸掛傾斜,左輪上了檯面後90度輪依然跟檯面有接觸。這情況持續直至前右輪上了檯面為止。
車身轉了多少角度右輪才上檯面是重要的,轉得不夠的話會「上檯失敗」導致整架車掉下的。我發現前輪跟90度輪接近些,兩個前輪離開多一些都有幫助。目前的距離及輪距都是試出來的,LEGO可用的Cone欵式只有兩種,暫時只找到這個設計可達至不跌的效果。
因手上沒有那上鏈的玩具車,只能從Youtube參考,要鳴謝以下xUmp視頻提供參考資料: