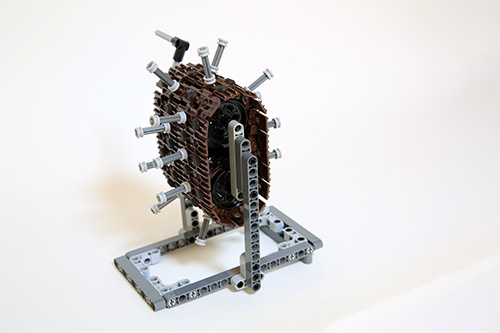
動畫的原理是快速地把一格格靜態的影像出現在眼前,攝影師 Eadweard Muybridge 在1887年為了研究馬匹走動時是否會全部腳都離地,他拍攝了多套相片,我用了這些影像來示範這個LEGO Technic 件做的動畫機。
Eadweard 用16幅相拍攝了馬匹的一個走動的循環,我就把這16幅影像打印出來貼在一個大Lego Wheel 上。因為要把16幅相平均分佈在360度的圓週上,打印前需要預備幾种略大略小的圖像來試試。

為達至動畫的效果,我們需要一個快門的機構:wheel 停下來,快門打開,看第一幅影像,快門關上,wheel轉動至下一幅影像,停下來,然後快門再打開來看第二幅影像。。。如此類推。

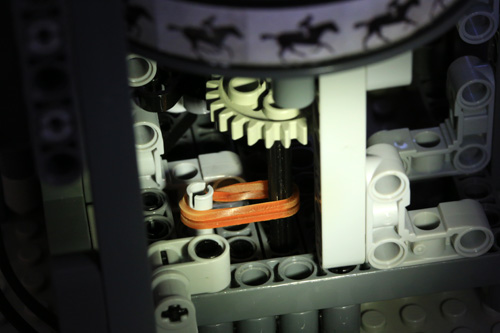
為了使 wheel 能一時走一時停,需要用上 Geneva Mechanism。這機構能產生每轉90度就停一停,趁它停時快門就可打開給看了。我參考了Lego 大師 Philo Hurbain 的 Geneva Mechanism 設計:http://www.brickshelf.com/cgi-bin/gallery.cgi?f=14845

馬達轉一圈 Geneva Mechanism 就轉1/4圈,可是在 wheel 上有 16 幅相,需要用齒輪使馬達轉一圈時 wheel 轉1/16圈。於是加了兩組 12T:24T 的 齒輪,1:2 再 乘1:2, wheel 就可以每1/16圈停一停。

至於快門就由同一個馬達用齒輪帶動一個連桿機構。

連桿機構產生 一個垂直運動,向上移動時把快門頂開,向下移動時快門就用自已的重量向下跌,覆蓋著影像。

Lego 齒輪是有虛位的,為了減低虛位引起的鬆動,可加些橡皮筋幫助。
因為齒輪虛位及 Lego 塑膠件不是很高精度及穩定性,所以馬達不能轉太高速,動畫的格數速度大概為2.7fps。



拍攝後才發覺馬匹的走動倒轉了,所以變成 moon walk 動畫!